写真計測ソフト『TwoView』の活用事例をご紹介します。
ロボットティーチング例
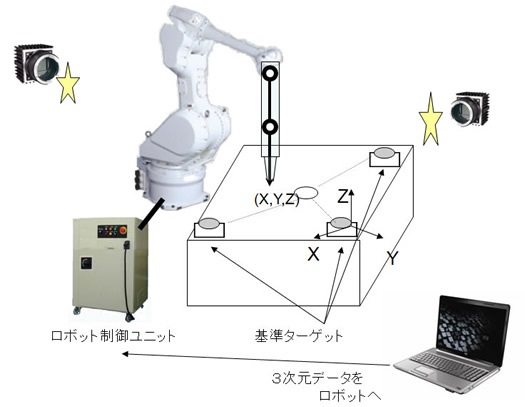
画像さえあれば三次元位置の計算ができるので、ロボットのティーチングなど用いることが出来ます。
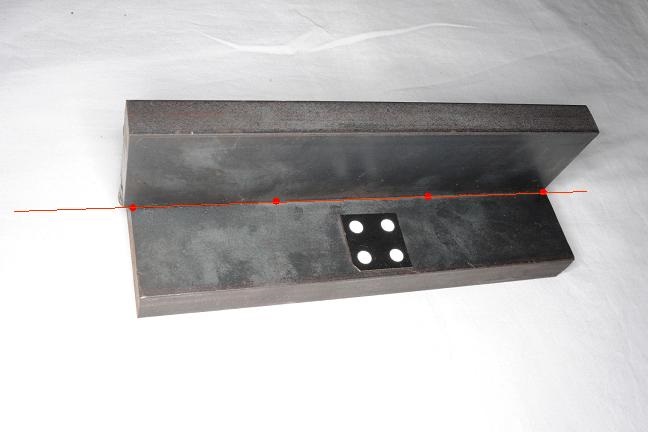
溶接部のティーチング位置の検出
3D点の機能を使い、溶接箇所のラインを検出します。3D点とは任意の位置の三次元座標を算出する機能です。 下の図の場合は、4つのターゲットのうち左下のターゲットを原点とした座標系で各点の座標値が得られます。 得られた数点の三次元座標を直線で結び溶接箇所のラインが得られます。
3D点


写真計測ソフト『TwoView』の活用事例をご紹介します。
画像さえあれば三次元位置の計算ができるので、ロボットのティーチングなど用いることが出来ます。
3D点の機能を使い、溶接箇所のラインを検出します。3D点とは任意の位置の三次元座標を算出する機能です。 下の図の場合は、4つのターゲットのうち左下のターゲットを原点とした座標系で各点の座標値が得られます。 得られた数点の三次元座標を直線で結び溶接箇所のラインが得られます。
3D点