

What is PhotoCalc?
Photogrammetry is a technology that calculates geometric features in photographs. It was developed in Europe more than 100 years ago. Today it is applied to aerophoto-measurements and in many other fields.
In recent years, photogrammetry systems are available for conventional digital cameras and a variety of products are sold in market.
However, most of them require many images for one calculation, which accompanies miscellaneous works (e.g. changing marker positions, etc ) and have been considered not very practical.
Our PhotoCalc, however, can calculate various measures even with one or two pictures. PhotoCalc is easy-to-use, high precision photogrammetry system.
Single View
Calculations from only one picture but various measurements and processes are possible as follows:
| 1.Distance in a plane | e.g. Width, pitch | View videos >> |
| 2.Three dimensions | e.g. Diameter and height | |
| 3.Hole measurements | e.g. Holes in a plane | |
| 4.Area | e.g. Athletic court | |
| 5.Front view correction | e.g. Ukiyoe painting | |
| 6.Crack detection | e.g. Crack detection | |
| 7.Measurements with laser rangefinder | e.g. Extended distance measurement |
Two View
Calculations from two views. Unlike stereo-camera, camera position does not need to be fixed. You can arrange angle as you like.
| 1.General 3D position and dimension measurements | View videos >> | |
| 2.3D hole measurements | ||
| 3.Robot teaching | e.g. Define teaching positions in the image | |
| 4.Measurements with laser rangefinder | e.g. Extended distance measurement |
Multi-View
Calculations from multiple images. Coded targets (marker) need to be taken with the object. Recommended for complicating shape (i.e. two images are not enough to get complete profile); camera lens distortion correction; camera position calculation (wand calibration).



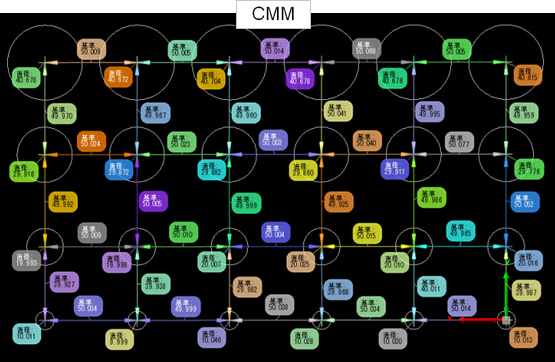
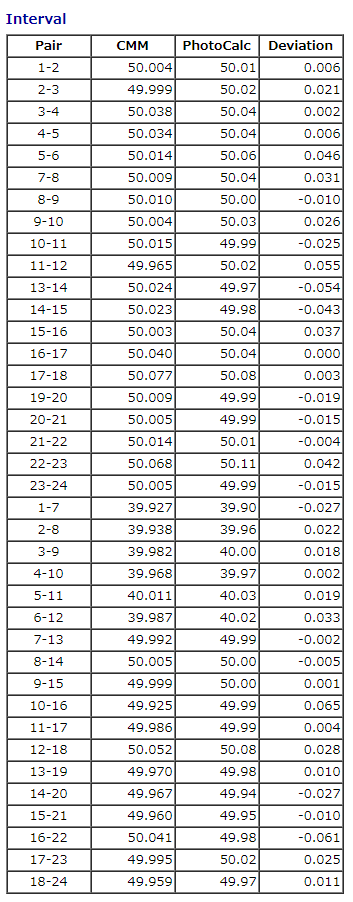
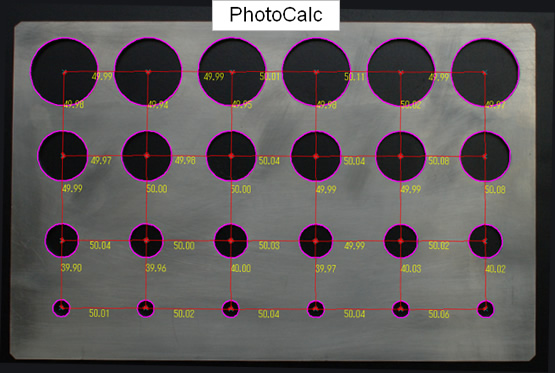
Photogrammetry system (Precision)
A scale bar (1096mm) is measured from different distances with 400mm reference plate. 10.2M pixel camera is used.
Single View
| Distance to object | Measure in X | Error in X | Measure in Y | Error in Y |
|---|---|---|---|---|
| 2m | 1095.763 | -0.237 | 1096.396 | 0.396 |
| 3m | 1095.853 | -0.147 | 1095.672 | -0.328 |
| 4m | 1096.447 | 0.447 | 1095.605 | -0.395 |
| 5m | 1095.787 | -0.213 | 1095.812 | -0.188 |
Two View
| Distance to object | Measure in X | Error in X | Measure in Y | Error in Y | Measure in Z | Error in Z |
|---|---|---|---|---|---|---|
| 2m | 1096.552 | 0.552 | 1096.981 | 0.981 | 1095.470 | -0.530 |
| 3m | 1096.291 | 0.291 | 1096.811 | 0.811 | 1094.996 | -1.004 |
| 4m | 1096.387 | 0.387 | 1095.945 | -0.055 | 1095.327 | -0.673 |
| 5m | 1096.119 | 0.119 | 1095.568 | -0.432 | 1095.822 | -0.178 |
Photogrammetry system (Spec and other info)
■Specifications
Single View (from one image)
- Two dimensional distance measurements (base module)
- Plane based three dimensional distance measurements (base module)
- Front view correction from angled view (base module)
- Hole detection, hole diameter, pitch between holes (optional)
- Rod diameter, rod to rod pitch for RC structures (optional)
Two View (from two images)
- Three dimensional distance measurements (base module)
- Output three dimensional coordinates (base module)
- Hole detection, hole diameter, pitch between holes (optional)
- Reference-plate-free measurements: calculate camera position from known reference points (optional)
■Notes
- Reference plate is not included in the package: available at additional cost.
- For better accuracy, camera internal parameters need to be calculated to correct distortion or nodal point deviation, which are inherent to camera lens.
ITTC offers calibration service and calibration software:
– Calibration service – check in your camera and we will calculate camera parameters for you.
– Calibration software – various camera parameters can be calculated. - For extremely large object, please consult with ITTC: ordinary setup (i.e. one reference plate) may not work. Additional references or other methods may be recommended (e.g. calculate camera position in place of reference plate).
- Single view 3D measurements are available in not all positions/orientations.